
Threading Space
Kinetic Sculpture Exploring Spatial Interaction Using Threads In Motion
Threading Space a kinetic sculpture that uses a swarm of mobile robots on the floor and ceiling to control lines of thread. By dynamically and geometrically reconfiguring physical lines, Threading Spaces manipulates the physical space that surrounds it. As the threads interact and intertwine with each other, they become a hypnotic medium for physical patterns in three dimensional space.
Date: June 2023-Present
Collaborators: You Li, Ramarko Bhattacharya, Harrison Dong, and Ken Nakagaki
Main Tools Used: Fusion 360, Prusa 3D printer, Processing IDE, Rust, Sony toio robots
My Role: CAD Designer for 3D printed Shells, and UI Software Engineer
This interactive sculpture was first exhibited at Ars Electronica Festival in Linz Austria, and was later installed at a variety of venues, including Creativity&Cognition Conference 2024 and South by Southwest 2024.
Exhibited at:
- Ars Electronica 2023
- South Side Science Festival 2023
- University of Chicago Axhibition 2024
- South by Southwest (SXSW) 2024
- Creativity & Cognition (C&C) 2024
Read more here:






About
Threading Space is a kinetic sculpture that explores how human’s spatial perception can be manipulated by reconfiguring physical lines of thread with a swarm of mobile robots on the floor and ceiling. Using lines of thread, the work outlines planes and volumes in space, creating pseudo boundaries, and plays with the viewer's natural sense of delimitation. Through a physical installation and an interactive Graphical User Interface (GUI), Threading Space invites the audience to explore the potential of using swarm robots and line elements to create, morph, and interact with space.
Background and Inspiration


postcard of GEGO's Reticulárea cuadrada 71/2 1971/89
my sketches inspired by the GEGO exhibit, Measuring Infinity, at the Guggenheim in New York, June 2023



Untitled (Sculptural Study, Two-part Vertical Construction) 1986/2008, Fred Sandback
AeroRigUI, Yu et al., CHI’23 (Photo on left taken by me)
Employing swarm robots for interaction and expression has been explored in HCI and interactive arts to develop new embodied experiences, allowing people to interact with collectively moving physical agents. The Actuated Experience Lab (AxLab) at the University of Chicago previously explored deploying magnet-embedded swarm robots on ceiling surfaces to enrich everyday spatial interaction with the project AeroRig (pictured above). By manipulating threads dynamically, Threading Space is able to explore new artistic expression and interaction beyond static line-based sculptures like Fred Sandback’s thread-employing vertical constructions or Gego’s reticular wire sculptures (pictured above, a big source of inspiration for the design of this project). By connecting two mobile robots at the ends of each thread and pairing the ceiling and floor robots, our team was able to program animation sequences and add customizability in "sculpting" this 3D space, dynamically forming various shapes.
Physical Setup
The installation setup consists of two mats that are 1260mm × 1188mm, with one mat on the floor, and a ceiling mat elevated to a height of 2.5m - 3.2m. Ten pairs of Sony toio robots are placed within 3D-printed shells on the floor and the ceiling. Threads (5mm-width stretchy nylon) connect the shells with a passive spring reel mechanism that allows them to collapse and extend as needed to maintain a straight line between the pair. As the robots move around on the ceiling and floor mats, the connected threads can form a wide variety of 3D shapes. The floor and ceiling surfaces are comprised of laminated toio mats, allowing the robots to localize, glued to ferromagnetic metal sheets. The work also utilizes a light placed on the floor or ceiling, using the threads as a medium to cast shadows on nearby walls.
Design of Shell Mechanism


Creating shells for the toio robots in Threading Space entailed a number of physical constraints and challenges to be accounted for, including coming up with a custom 3D-printed reel mechanism that allowed for the string to collapse and expand, making sure the magnetic strength held the robots on the ceiling without affecting their locomotion, and preventing the twisting of string, which was solved using a ball joint. This final design, modeled with Fusion 360 CAD software, came from rounds of iterative prototyping and testing in our floor-to-ceiling setup.
Software

The GUI control tool of Threading Space, created in Processing. Each bar represents a different aspect of the animation that can be adjusted by simply clicking and dragging.
Threading Space’s animation system supports two distinct modes of interaction. Display Mode cycles through pre-designed animations, each aimed to create a sensation of transforming a user’s perception of space. Interactive Mode allows users to control and manipulate the animations with fine-grained control with a custom user interface developed with Processing IDE. They can adapt the speed and other parameters of the floor and ceiling robots through sliders, allowing them to customize the animations. Threading Space also employs a Multi-Agent Path Finding algorithm to transition between the modes and animations. By traveling on a coordinate plane, the pairs of robots on the floor and ceiling can synchronously and automatically move to prevent collisions of robots and entanglement of threads during the transitions.
Interaction Design
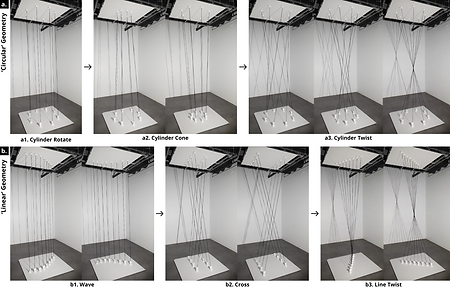

Animations: The design of Threading Space allows for an infinite variety of animations that can transform space across time. In order to display these possibilities, we pre-designed a series of animations. Our animations are built on two major groups: Circular and Linear Geometries. On top of these geometric bases, we used symmetry and dissonance between the floor and ceiling to form constantly changing shapes and create visual effects. This figure shows both of these Circular and Linear Geometries in action.
Spatial, Tangible and Bodily Interactions: Threading Space allows for a breadth of bodily interactions. Because of the floor-to-ceiling setup, the sculpture takes new forms based on the viewer’s position in the room, inviting the viewer to walk around and even through the installation. Users can interact with the sculpture by gently touching and pulling on the threads to deform and affect the overall shape. Due to the ability of each robot to self-correct to animations, viewers can disrupt their motion, allowing for purposeful entanglement and experimentation.